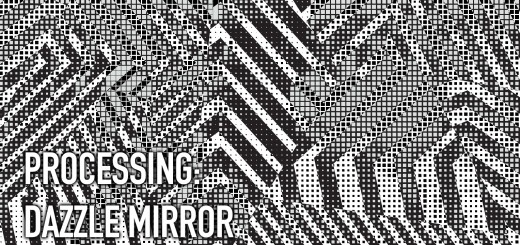
Processing: Dazzle Mirror
Wanted to share a super quick project I put together as a concept last night! Based on Daniel Shiffman’s Mirror 2 Example within Processing, this project expands the basic code to include a visualization...

Wanted to share a super quick project I put together as a concept last night! Based on Daniel Shiffman’s Mirror 2 Example within Processing, this project expands the basic code to include a visualization...
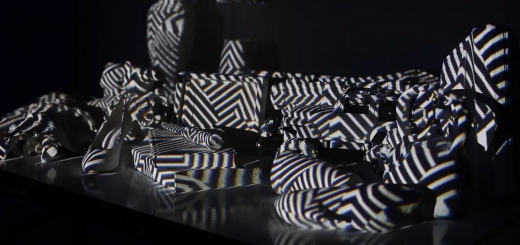
In this mixed media installation, I seek to explore the effects with which the relationship of perspective and technology has on our ability to see – and not see – various realities. Wordy artist statement aside,...
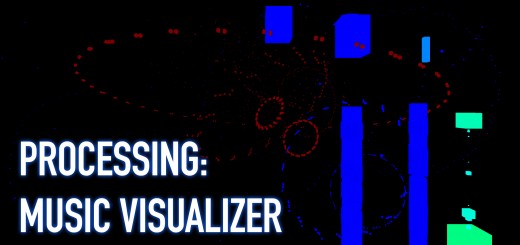
Processing is an incredible platform for creating truly dynamic works with very little work. While learning about the language, adjusting to its syntax, and playing with libraries, I created a music visualizer which uses the...
I am beyond honored to share my Student Spotlight featured on Cornell’s Information Science website. Take aIt loosens the tight muscles and increases the blood supply into the required area.Sildenafil Citrate (get levitra ) is...

In my attempts to understand the ways in which I can use pixels[] in Processing, I came across an example of a pixel sorting image on a Glitch Artist forum I frequent. I quickly...

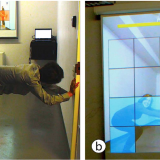
Mike Pelletier is a multimedia artist who seems to be finding new ways to embrace the latest technologies for his own works. I came across his Kinect Portrait series recently and absolutely love the...

I’ve given in. After far, far, far too many hours hoping to find some life in the Processing community surrounding the Kinect V2, I’ve come to conclude that the only worthwhile move for the...
Just stumbled upon a brilliant resource for the latest and greatest works in the (dying?) world of Processing! Head on over to For Your Processing to see inspirational projects, learn about the libraries involved, and...

First, let me start by saying that, at this point, I have officially stared at my face for far longer than I am comfortable with today. In part, because I cannot get over the incredible...
With a satisfying “whoosh,” my beautiful HP tower whirls to life after a hiatus of far too many weeks. A century of updates and patches later, my highly-spec’d Windows powerhouse is back in action. I...